JSR's Roboter-Handling-Prozessautomatisierung mit YASKAWA Der Handhabungsroboter wird bei der Handhabung und Entpackung von Kunststoffpartikelbeuteln eingesetzt, es ist einPräziser, zuverlässiger und nachhaltiger Handhabungsbetrieb, der einen Mehrwert zur Förderung der Produktionsautomatisierung bietet.
Ob in Maschinen, Landwirtschaft, Bekleidung, Bauwesen oder im Alltag – recycelte Kunststoffpartikel sind allgegenwärtig. Nach dem Verpacken müssen diese Partikel manuell gehandhabt werden, was eine zeitintensive und kostenintensive Arbeit ist. Die bisherige Arbeitszeit des Kunden betrug 8 Stunden, und jeder Materialsack wog 25 kg. Die manuelle Effizienz liegt bei 2 Säcken pro Minute, und 960 Säcke können pro Tag zerlegt werden. Die Bearbeitungszeit nach der Handhabung und Zerlegung durch einen Roboter beträgt 24 Stunden. Bei kontinuierlichem Betrieb liegt die Effizienz bei 3 Säcken pro Minute, und 4320 Säcke können pro Tag zerlegt werden.
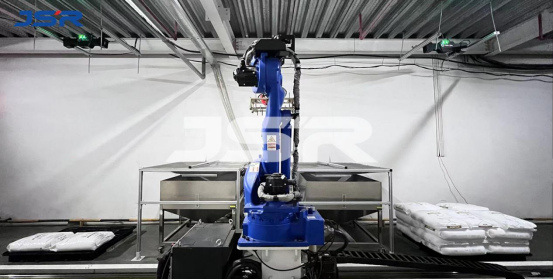
Die von Jiesh implementierten LösungenEng für Kunden: Yaskawa-Handhabungsroboter GP180, 7,5 m lange Bodenschiene, Materialbehälter, Materialgestell, GP180 maximale Belastung 180 kg, maximale Armspannweite 2702 mm. 7,5 m Erdumlaufbahn, effektive Bewegung 6 m, Bewegungsgeschwindigkeit 0,7 m/s. 3D-visuelles Identifikations-Ausblendsystem. 3D-visuelles Identifikations-Ausblendsystem, Kamera mit Lernfunktion, durch frühe Materialdatenerfassung und spätere Materialmodellierung, sodass die Erfolgsrate der Kameraerkennung 99,9 % beträgt.
Die automatische Produktion verbessert die Arbeitseffizienz erheblich, sorgt für stabile Produktionskapazität, präzise Lieferung, hohe Sicherheit, sinnvolle Nutzung der vorhandenen Fläche, verbessert das Unternehmensimage und die Sauberkeit in der Werkstatt und ermöglicht eine unbemannte Produktion.
Veröffentlichungszeit: 26. September 2022
